Plicul de lucru al unui robot industrial este un concept fundamental care influențează semnificativ aplicarea și performanța acestuia în diferite industrii. În calitate de lider de robot industrial, înțelegem importanța acestui concept și implicațiile sale pentru clienții noștri. În această postare pe blog, vom aprofunda detaliile despre care este plicul de lucru al unui robot industrial, de ce contează și cum se raportează la ofertele noastre de produse.
Definirea plicului de lucru
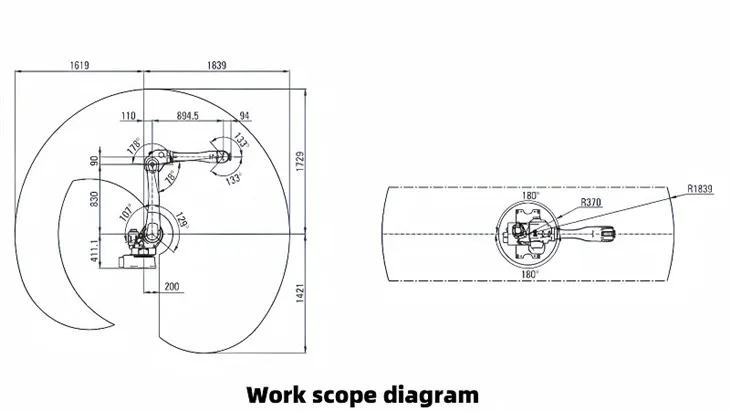
Plicul de lucru al unui robot industrial se referă la spațiul cu trei dimensiuni în care poate ajunge efectorul robotului. În esență, volumul de spațiu poate accesa și manipula obiectele. Acest spațiu este determinat de mai mulți factori, inclusiv designul mecanic al robotului, lungimea brațelor sale, gama de mișcare a articulațiilor sale și tipul de mișcare pe care îl poate efectua (cum ar fi liniar, rotativ sau o combinație a ambelor).
Pentru a vizualiza plicul de lucru, imaginați -vă un braț uman. Zona la care mâna ta poate ajunge în timp ce stai într -un singur loc și îți mișcă brațul în toate direcțiile posibile reprezintă o versiune simplificată a unui plic de lucru. Pentru un robot industrial, această zonă este calculată și definită precis pe baza parametrilor săi de proiectare specifici.
Factori care afectează plicul de lucru
Proiectare mecanică
Structura mecanică generală a robotului joacă un rol crucial în determinarea plicului său de lucru. Diferiți tipuri de roboți, cum ar fi roboți articulați, roboți cartezieni și roboți Scara, au modele mecanice distincte care duc la plicuri de lucru diferite.

Roboții articulați, care sunt cel mai frecvent tip în aplicațiile industriale, au mai multe articulații care permit o gamă largă de mișcare. Plicurile lor de lucru sunt adesea sferice sau cilindrice, permițându -le să ajungă la obiecte din diverse unghiuri. Acest lucru le face potrivite pentru aplicații precumRobot de sudare auto, unde trebuie să acceseze diferite părți ale unui corp auto pentru sudare.
Roboții cartezieni, pe de altă parte, se mișcă de -a lungul a trei axe liniare (x, y și z). Plicurile lor de lucru sunt de obicei dreptunghiulare sau cubice, oferind mișcare precisă și simplă. Acești roboți sunt folosiți în mod obișnuit în aplicații Pick - și - Place unde trebuie să mute obiecte într -o linie dreaptă într -o zonă dreptunghiulară definită.
Roboții Scara (Scara (Robot Robot de asamblare selectivă) au o combinație de mișcare rotativă și liniară. Acestea sunt concepute pentru a fi conforme în planul orizontal și rigide în planul vertical, ceea ce duce la un plic de lucru cilindric. Roboții SCARA sunt adesea folosiți în operațiunile de asamblare, cum ar fi asamblarea componentelor electronice.
Lungimea brațului
Lungimea brațelor robotului are, de asemenea, un impact direct asupra dimensiunii plicului său de lucru. Armele mai lungi permit, în general, robotului să ajungă la distanțe mai îndepărtate, crescând volumul plicului de lucru. Cu toate acestea, brațele mai lungi pot reduce, de asemenea, capacitatea de încărcare a robotului și viteza din cauza inerției crescute. Prin urmare, trebuie să se atribuie un echilibru între lungimea brațului, capacitatea de sarcină utilă și viteza în funcție de cerințele specifice ale aplicației.
Gama comună de mișcare
Gama de mișcare a fiecărei articulații din robot determină flexibilitatea și atingerea în cadrul plicului de lucru. Un robot cu o gamă mai largă de mișcare comună poate accesa mai multe puncte în cadrul plicului său de lucru, permițând sarcini mai complexe. De exemplu, un robot cu o articulație care poate roti 360 de grade are o flexibilitate mai mare în comparație cu unul cu un interval de rotație limitat.
Importanța plicului de lucru
Adecvarea aplicației
Plicul de lucru este un factor critic în determinarea dacă un robot anume este potrivit pentru o aplicație specifică. De exemplu, într -o fabrică la scară largă, unde trebuie să fie gestionate obiecte mari, este necesar un robot cu un plic mare de lucru. Pe de altă parte, într -un cadru de laborator la scară mică, unde este necesară o manipulare precisă a obiectelor mici, poate fi mai potrivit un robot cu un plic de lucru mai mic, dar mai precis.
Productivitate și eficiență
Un plic de lucru bine definit poate îmbunătăți productivitatea și eficiența unui proces de fabricație. Prin asigurarea faptului că robotul poate atinge toate punctele necesare din spațiul de lucru, necesitatea repoziționării robotului sau a piesei de lucru este redusă la minimum. Acest lucru reduce timpul de ciclu și crește debitul general al liniei de producție.
Siguranţă
Înțelegerea plicului de lucru este, de asemenea, esențială pentru asigurarea siguranței lucrătorilor și a altor echipamente din vecinătatea robotului. Definind clar limitele plicului de lucru, pot fi instalate bariere și senzori de siguranță pentru a preveni coliziunile accidentale între robot și alte obiecte.
Ofertele noastre de produse și plicurile de lucru
În calitate de furnizor de robot industrial, oferim o gamă largă de roboți cu plicuri de lucru diferite pentru a răspunde nevoilor diverse ale clienților noștri.
NoastreRobot de sudare autoeste proiectat cu un plic de lucru mare și flexibil pentru a găzdui formele și dimensiunile complexe ale corpurilor auto. Designul articulat al acestor roboți le permite să ajungă la diferite puncte de sudare din diferite unghiuri, asigurând suduri de înaltă calitate.
NoastreRobot polonezeste optimizat pentru aplicații de finisare a suprafeței. Are un plic precis de lucru care îi permite să ajungă la toate suprafețele piesei de prelucrat, oferind un lustruit uniform și de înaltă calitate.
Pentru aplicații de colaborare, al nostruRobot de cooperareare un plic de lucru proiectat cu atenție, care îi permite să funcționeze în siguranță alături de operatorii umani. Mișcarea robotului este limitată la o anumită zonă, iar caracteristicile de siguranță sunt încorporate pentru a preveni orice potențial prejudiciu pentru operatori.
Selectarea robotului potrivit pe baza plicului de lucru
Atunci când selectați un robot industrial, este crucial să luați în considerare cerințele plicului de lucru ale aplicației. Iată câțiva pași pentru a vă ajuta să faceți alegerea corectă:
Definiți aplicația
Definiți clar sarcinile pe care robotul le va îndeplini, cum ar fi sudarea, pictura, asamblarea sau manipularea materialelor. Acest lucru vă va ajuta să determinați dimensiunea și forma plicului de lucru necesar.
Măsurați spațiul de lucru
Măsurați dimensiunile fizice ale spațiului de lucru unde va fi instalat robotul. Luați în considerare orice obstacole sau constrângeri care pot limita mișcarea robotului.
Evaluați cerințele de sarcină utilă și de viteză
În plus față de plicul de lucru, luați în considerare capacitatea de sarcină utilă și cerințele de viteză ale aplicației. Un robot cu un plic mare de lucru poate să nu fie adecvat dacă nu poate gestiona sarcina utilă necesară sau funcționează la viteza dorită.
Concluzie
Plicul de lucru al unui robot industrial este un factor cheie care determină performanța și adecvarea acestuia pentru diferite aplicații. În calitate de furnizor de robot industrial, ne -am angajat să oferim clienților noștri roboți care au plicuri de lucru potrivite pentru a răspunde nevoilor lor specifice. Indiferent dacă vă aflați în automobile, electronice sau în orice altă industrie, avem expertiză și produse care să vă ajute să vă optimizați procesele de fabricație.
Dacă sunteți interesat să aflați mai multe despre roboții noștri industriali și despre modul în care plicurile lor de lucru pot beneficia de afacerea dvs., vă încurajăm să ne contactați pentru o consultație detaliată. Echipa noastră de experți va fi bucuroasă să vă ajute în selectarea robotului potrivit pentru aplicația dvs. și vă va ghida prin procesul de achiziții.
Referințe
- Craig, JJ (2005). Introducere în robotică: mecanică și control (ediția a 3 -a). Pearson Prentice Hall.
- Sicilian, B., Sciavicco, L., Villani, L., & Oriolo, G. (2008). Robotică: modelare, planificare și control. Springer.
- Spong, MW, Hutchinson, S., & Vidyasagar, M. (2006). Modelarea și controlul robotului. Wiley.